
{kind=link}
Artificial intelligence is learning the touch of a chef.
TRONDHEIM, Norway | June 2026
Researchers at the Norwegian University of Science and Technology have developed a three-armed robot capable of preparing sashimi from fresh salmon with 95 percent tactile precision. The system, called Sashimi-Bot, was designed to handle a task that remains difficult for conventional industrial machines because raw fish is soft, flexible and constantly changes shape during manipulation. One robotic arm positions the fillet, another operates a chef’s knife and a third uses chopsticks to transfer the finished slices to a tray. The project demonstrates how artificial intelligence, advanced sensors and coordinated robotics can move automation beyond rigid factory materials.
Industrial robots already perform repetitive operations with speed and reliability, but most are optimized for objects that retain a predictable shape. Salmon behaves differently because it bends, slides and deforms as pressure is applied. A small error in positioning can change the thickness of a cut or cause the knife to miss the intended line. Human chefs compensate through vision, touch and experience, abilities that engineers have struggled to reproduce in machines.
The research team addressed the positioning problem through deep reinforcement learning. Instead of training the robot entirely with real fish, the engineers created a virtual environment in which the system performed thousands of simulated movements. The robot gradually learned how to stabilize and reposition the salmon before cutting it. That knowledge was then transferred to the physical machine without requiring an additional training phase using real fillets.
This simulation-based method reduced the amount of food needed during development and allowed the system to practice far more variations than would have been practical in a kitchen. The virtual model exposed the robot to different positions and movement patterns while rewarding actions that produced a stable cutting setup. Training in simulation also made it possible to repeat failures without damaging equipment or wasting ingredients. The approach shows how artificial intelligence can prepare robots for complex physical work before they encounter real materials.
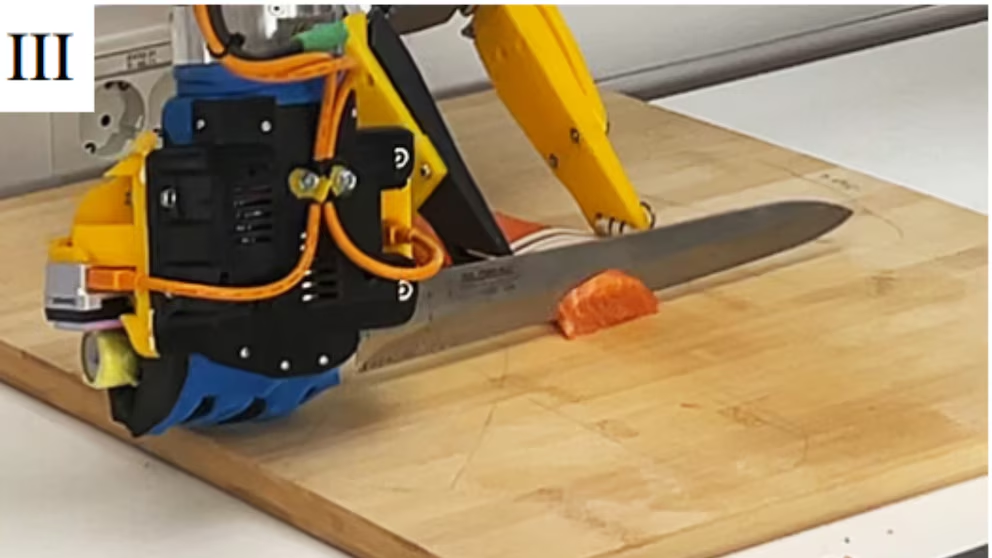
Cutting accurately required a second technological solution because the robot needed to detect the exact moment when the knife reached the cutting board. The blade was held by a soft robotic gripper, meaning slight changes in pressure could alter its position. Without reliable feedback, the system could cut too shallowly, press too hard or damage the knife and work surface. Engineers therefore added a GelSight tactile sensor to give the machine a more precise sense of contact.
GelSight uses a soft gel surface and an internal camera to measure pressure-induced deformation. The sensor converts those visual changes into information about touch, allowing the robot to recognize when the blade contacts the board. Its neural network was trained with more than 12,000 data samples gathered from 157 cutting movements. The final system achieved 95 percent accuracy in contact detection and reached 99 percent during controlled testing.
That tactile feedback allowed Sashimi-Bot to adjust cutting depth rather than relying only on a fixed programmed movement. This capability is essential when working with natural products because no two fillets have exactly the same thickness, moisture or texture. A system that follows an inflexible path may perform well under laboratory conditions but fail when the material changes. By detecting contact directly, the robot can respond to the physical reality of each cut.
Tests with real salmon produced 34 slices measuring between 6 and 16 millimeters in thickness. Six pieces remained attached to the knife after cutting, a common problem when handling moist raw fish. The robot successfully recovered all six slices directly from the blade instead of losing or damaging them. This result showed that the system could continue operating even when the food did not behave exactly as expected.
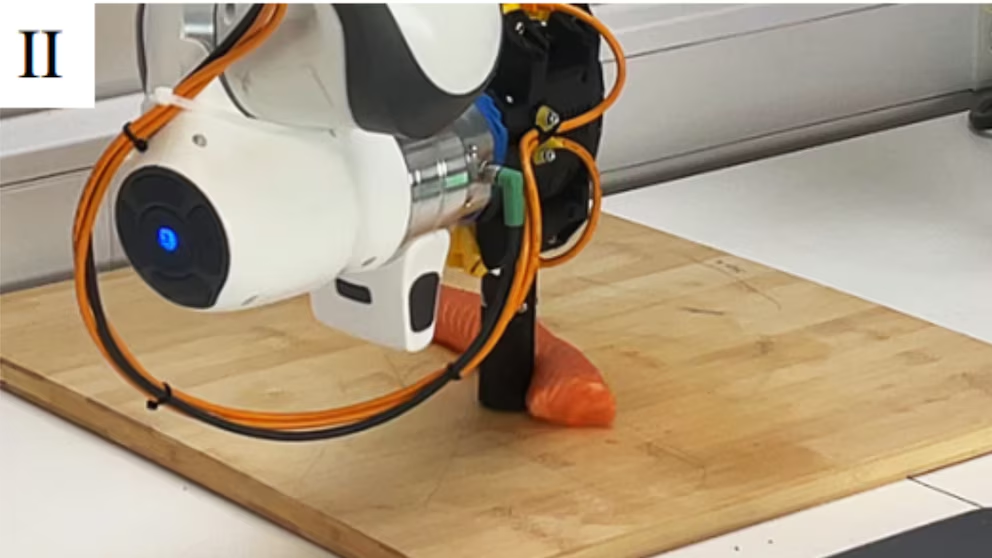
The remaining pieces presented another manipulation challenge because the robot had to lift them from the board using chopsticks. Sashimi-Bot transferred 26 of the 28 slices left on the cutting surface without human assistance. The two failures involved extremely thin pieces that slipped during handling. Even with those mistakes, the success rate indicated that coordinated multi-arm robotics can perform delicate food-preparation tasks with a high level of reliability.
The three-arm design is central to the system because sashimi preparation involves more than cutting. One arm must maintain the position of the salmon while another applies controlled force through the knife. The third must then collect and arrange each slice without tearing it. Coordinating those movements requires the robot to understand the relationship between several tools, the changing shape of the food and the location of the serving tray.

The project could influence food-processing companies facing labor shortages, rising costs and demand for greater consistency. Automated cutting systems may help standardize portion size, reduce waste and improve safety in high-volume production environments. However, the technology is not yet a simple replacement for trained chefs because it still operates within a carefully designed task and controlled workspace. Human supervision, hygiene requirements and maintenance would remain essential in commercial use.
Its potential extends beyond kitchens and seafood plants. The same combination of tactile sensing, reinforcement learning and multi-arm coordination could be useful wherever machines must handle soft or deformable materials. Healthcare is one possible field because surgical tissues, medical dressings and biological samples require precise pressure and careful manipulation. Textile production, recycling and agricultural processing could also benefit from robots capable of adapting to objects that do not hold a fixed shape.
Sashimi-Bot represents a broader change in robotics from rigid automation toward physical intelligence. Earlier machines performed best when factories were redesigned around their limitations. New systems are increasingly expected to interpret uncertain environments and adjust their behavior in real time. The Norwegian project suggests that touch may become as important as vision in the next generation of industrial robots.
The robot’s achievement is not simply that it can cut fish. Its importance lies in the ability to learn through simulation, sense physical contact and coordinate several actions around an unpredictable material. A 95 percent tactile accuracy rate marks substantial progress toward machines that can work safely with delicate objects. From the factory floor to the kitchen, robotics is beginning to acquire the adaptability once reserved for skilled human hands.
Innovation begins where rigidity ends. / La innovación comienza donde termina la rigidez.